
- 設備咨詢熱線:
13306125296 - 等離子配件咨詢:














自動化機械手
- 常州市海寶焊割有限公司市公司是一家以生產焊接機器人為主的企業,主要產品有自動焊接機器人,江蘇焊接機器人,進口焊接機器人,蘇州焊接機器人,安川焊接機器人為自動化焊接設備的生產廠家,我公司強大的工程師團隊為您盡心服務。邵經理:177-5158-3908
- 技術及商務咨詢:徐經理 13306125296





自動化機械手由于具有生產過程自動化、勞動強度小、生產效率高、產品焊接質量穩定、可持續作業等優點,在工程機械系統中得到了廣泛應用。我國自動化機械手優質先主要應用于汽車行業,工程機械行業應用自動化機械手較晚,目前處于引進消化階段。本文以ABB機器人焊接內燃叉車車架的焊接系統為例,具體介紹自動化機械手在叉車車架焊接上的應用,主要包括:如何選型搭建工作站,以及在調試過程中出現的常見問題及如何解決。
一、前期焊接工作站的搭建
前期,通過到客戶現場參觀以及與客戶溝通,了解焊接工件—叉車車架的焊接特點。根據叉車車架的結構及焊接工藝,采用機器人專用的三維模擬軟件初步搭建了一個焊接工作站。
1、機器人設備的選型
首先,根據叉車車架的焊接工藝以及客戶的預算標準,選擇ABB公司一款專用的弧焊機器人IRB 1520,它有6個操縱器軸,上臂結構緊湊,專為弧焊的集成而設計。控制系統配備IRC5控制器,該控制器包含控制機械臂、附加軸和外圍設備所需的電子裝置。標配控制軟件支持機器人系統的方方面面,如動作控制、應用程序的開發和執行以及通信等。
2、焊接系統的配置
在焊接工作中,焊接系統的配置十分重要,在機器人焊接工作站中,所選的焊接系統除滿足焊接工件的一般焊接工藝要求外,還必須與機器人系統相匹配。
因為客戶現場手工焊用的是松下的焊接電源,所以他們希望機器人焊接工作站仍選用松下焊接電源。但筆者查閱松下送絲機和焊槍的接線圖,發現其和ABB的機器人系統無法連接,所以建議客戶選用和ABB機器人控制系統相匹配的肯比的焊接系統。安裝在肯比焊接電源上的DeviceNet用于機器人控制器IRC5與電源之間的通信。
3、變位機和外圍設備的選型
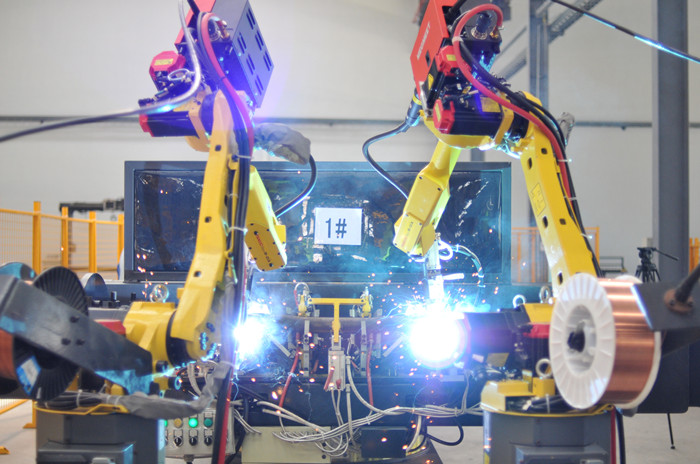
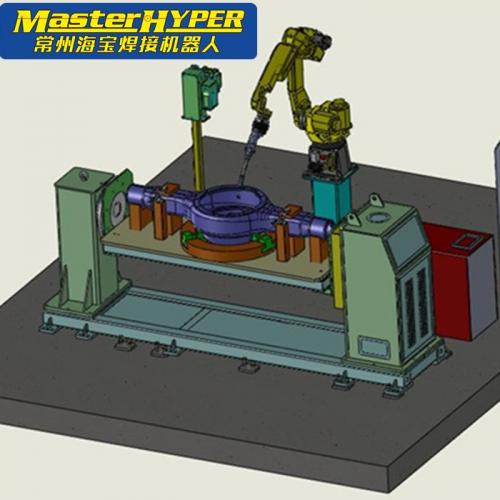
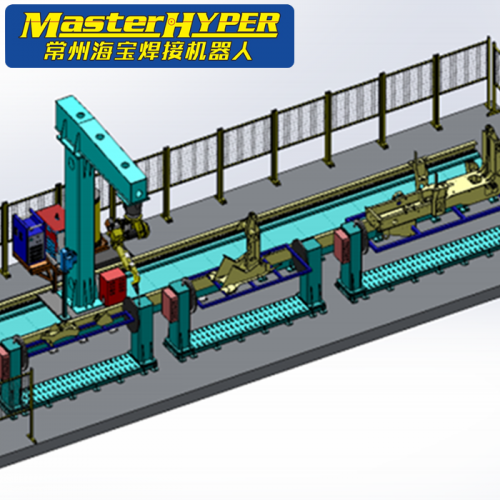
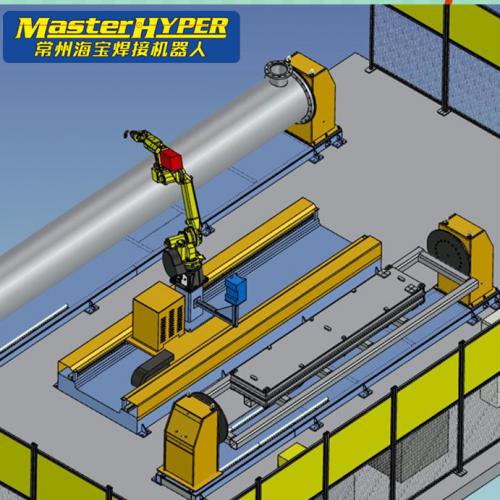
由于叉車車架是由多個工件拼裝而成,體積和重量相對較大,筆者放棄了選用小工件所用的尾架式變位機,改用頭、尾架式變位機,其驅動部分選用了ABB伺服電機、減速機以及回轉支撐。這樣整個變位機的結構就很緊湊,承受的力矩很大,精度很高。在前期模擬時,選用的是單工位,在工件的上料和下料過程中,機器人處于停止工作的狀態,達不到客戶所要求的生產節拍。為使機器人一直處于工作狀態,提高生產節拍,后經項目組討論決定選用雙工位,這樣在一個工件焊接完成后,機器人可以立即焊接下一個工件(圖1)。
圖1 叉車車架雙工位機器人焊接工作站
二、現場調試中出現的主要問題及解決方案
前期工作站搭建完成后,在正式進入生產前調試工作是必須的。因為在現場調試過程中會出現一些實際性的問題,只有這些問題得到解決,在正式投入生產時才能保證焊接工作的順利進行。這個項目在調試過程中也遇到了一些問題,機器人焊接叉車車架在調試中出現的主要問題及解決方案具體如下:
1、在圓弧處出現假焊
在車架左右擋泥板的圓弧處和油箱側板圓弧處,經常會出現看似焊接好,但經質檢檢查達不到焊接工藝要求的焊縫。焊接不牢或有些地方出現假焊的情況,將會導致擋泥板與其相連接的工件直接連接強度不夠。在項目調試階段,筆者在檢測油箱試漏時,有時會發現油箱側板圓弧處出現側漏,經檢測發現油箱側板圓弧處焊縫質量達不到要求。通過現場實際反復調試實驗并對焊接工件進行分析得知,有些油箱側板圓弧處折彎公差大,使得拼裝時圓弧度不一,導致機器人尋找焊縫時會出現偏移,發生假焊。
針對以上情況采取兩個措施方案:
(1)編程時在圓弧處增加程序點,并降低速度,保證圓弧處焊縫的焊接達到焊接工藝要求。
(2)更改運動指令,在原指令MoveC的基礎上采用MoveCDO運動指令,因為這個指令機器人是通過中間點以圓弧運動方式運動至目標點,并且在目標點將相應輸出信號設置為相應值,在原來指令的基礎上增加信號輸出功能。改進程序后,對多個焊接工件進行檢測,發現不再出現假焊。
2、在工件折彎處出現漏焊
叉車車架組裝時有些是折彎件,這些件的折彎弧度或折彎角度會有所偏差。所以在拼裝時,對應這些焊縫的位置會發生偏移。因為機器人是事先擬定焊接位置的,所以當焊接位置發生偏移時,機器人無法識別,將導致此處焊縫出現漏焊或只焊接邊緣。這些漏焊的焊縫需要后期焊工手工補焊,降低了工作效率。
我們從以下兩個方面著手,解決折彎件折彎處焊縫漏焊現象:
(1)向客戶提議增設質檢監控點,在叉車車架拼裝前嚴格控制尺寸。對拼裝尺寸不在公差范圍內、不合格的禁止轉入焊接工位。
(2)在機器人系統內增加激光跟蹤儀標定功能(Laser Tracker Calibration),因為在LTC系統里每個傳感器優質多有3個標定功能,可以保證在同一空間中不同位置的精度要求(圖2)。
圖2 角度說明
3、在電弧干擾下焊接過程不穩定
在調試過程中時而會出現焊接過程不穩定的現象,工作現場還有其他設備在運行,它們會產生電磁場,而且自動化機械手工作站本身也會有電弧和電磁干擾。為保證焊接的穩定性和提高焊接的控制精度,經分析討論,決定重新對工作站做屏蔽措施。首先對與焊接電源連接的電源線、接地線、信號線做屏蔽,在其線纜外部套上屏蔽裝置,并用同樣的方法屏蔽機器人控制器IRC5上的電纜;然后在工位及工裝夾具上裝上絕緣套,做好與焊接工件和大地的屏蔽絕緣;對送絲機和焊槍也分別裝上絕緣墊,使其與機器人絕緣,防止產生靜電。
4、機器人出現的故障報警
在現場調試過程中機器人經常會出現故障報警,導致焊接工作停滯。調試期間示教器上出現過如下故障報警:
(1)碰撞報警(故障代碼10024)。因為沒有任何外界因素進入和機械手發生碰撞,機械手也沒有和工件及外圍設備發生碰撞,故在機器人系統里增加一個碰撞檢測軟件選項,以減少機器人承受的碰撞力度,還有助于避免機器人和外部設備受到嚴重損傷。“碰撞檢測”檢測到一次碰撞時,相關機器人會立即停止,并沿其路徑反向移動一小段距離來釋放余力。當接收了一則碰撞錯誤消息后,系統便能繼續執行相應的移動,而無需按下相關控制器上的“電機開啟”。
(2)外部設備溫度高報警(故障代碼20253)。出現此報警是由于焊接系統溫度過高,因為前期在現場,焊接系統里沒有冷卻裝置,后來增加冷卻水循環裝置來防止焊接溫度過高。
(3)信號參考無效報警(故障代碼110302)。經檢查是工具硬核點(TCP)錯誤。經查閱技術手冊,發現在前期的系統里沒有牛眼(Bulls Eye)軟件和相關硬件來校準工具硬核點。通過這個項目,筆者了解到牛眼在機器人焊接系統里非常重要,如條件允許,此項要選購。牛眼提供了完全自動化的工具硬核點(TCP),還配置了新的工具來支持MIG焊槍。當機器人圍繞TCP編程時,如果點被損壞、程序再次運行,機器人重復同樣的動作,會由于TCP錯位不再遵循相同的路徑。圍繞焊槍定義的TCP(圖3)是直接對準一個看不見的參考點,焊絲硬核會從氣嘴底部觸及工件,使用預先確定的距離。
圖3 圍繞焊槍定義的TCP
三、自動化機械手在工程機械上應用的經驗與分享
通過自動化機械手應用于內燃叉車車架焊接的案例分析可以看出,在前期搭建工作站時,機器人設備的選型并不難,一般機器人公司都有對應的標準,但是焊接系統的選型卻是多樣化的。這個項目的以下經驗值得分享:
(1)選擇焊接系統時,除考慮焊接工件的焊接工藝外,焊接系統與機器人系統的通訊連接也是十分重要的,有利于保證焊接質量。
(2)提高生產效率必須以安全為前提,所以在設計方案時要以人、機、料的安全為根本。
(3)正式投入生產前的調試工作是必須的,要解決調試過程中出現的問題,以保證焊接工件滿足相關工藝要求。
(4)在機器人系統軟件配置時要考慮是否需要碰撞檢測軟件,牛眼在機器人焊接系統中非常重要,建議選購此項。
四、結語
自動化機械手在實際生產過程中的運用是一個復雜的系統工程,不僅僅涉及前期焊接工作站的搭建,而且與后期現場調試等有著重要聯系,在機器人焊接叉車車架這個項目中,通過前期三維模擬焊接工作站的搭建,實際現場安裝調試的實時監控,以及有效處理調試過程中遇到的實際問題,才能確保每個程序的有效銜接,保證整個項目的順利運行。

我要評論




評論列表